Interactive AI simulation developed in Unity3D featuring a neural network trained using genetic algorithms. The agent evolves over successive generations, optimizing its behavior through selection, crossover, and mutation. The simulation can be reset to observe the full training cycle and evolutionary process in real time.
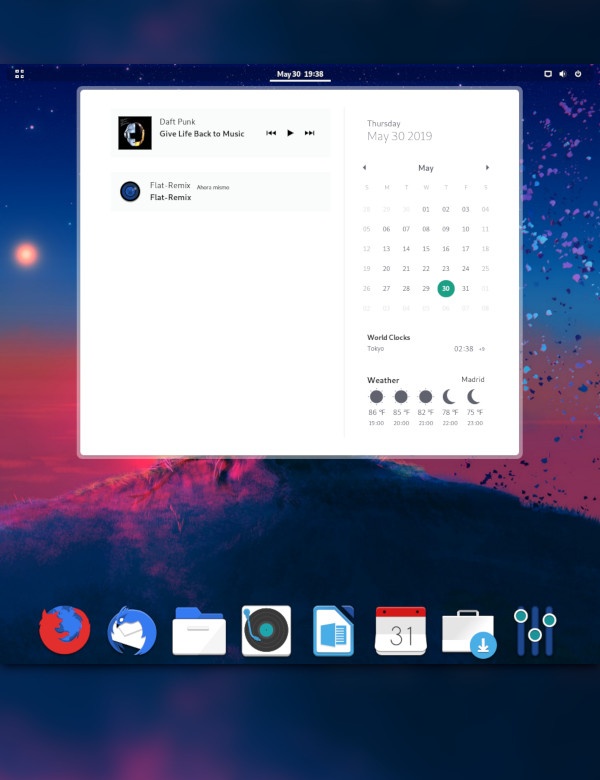
Just like for previous releases, here I want to show a more in-depth view of the visual and aesthetic modifications that come with it. If you want to read more about all the new changes, don't forget to visit the release post:
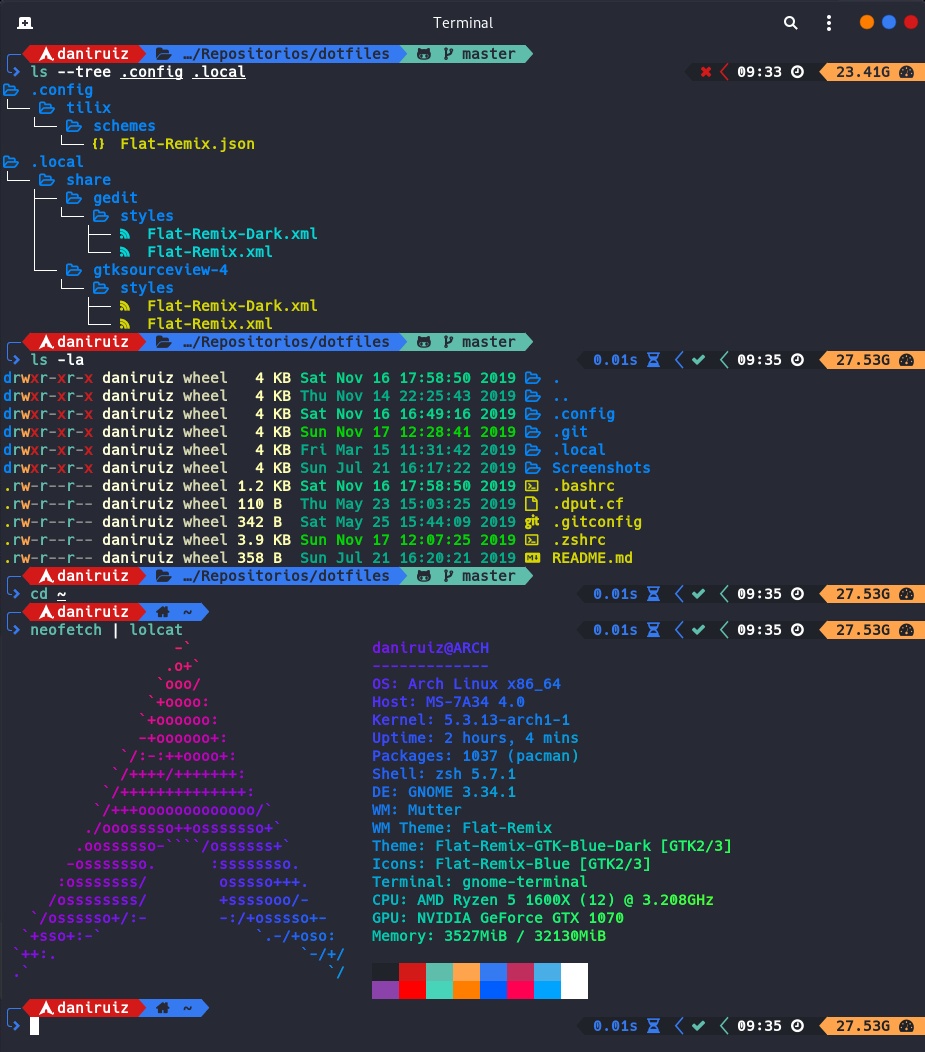
As a Linux user, I enjoy working with the terminal, and I find it an especially powerful tool. Therefore, I've spent quite a long time customizing it, and here is my definitive guide for terminal customizations.
First I thought I would only create a short post with some of the tweaks I like. But I had so many things I wanted to show that this started to become a considerably long post. So I've decided to publish it now, with as many tips as I can write, and I'll be updating it with new tips & tricks.
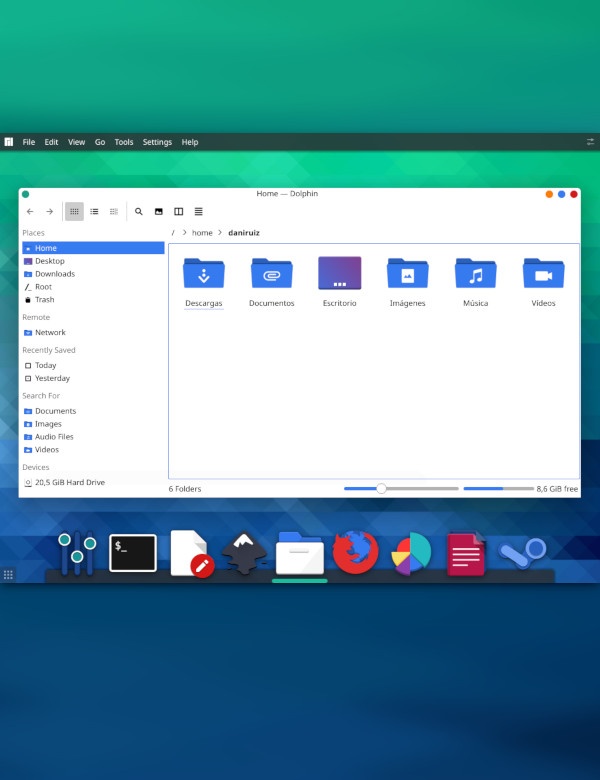
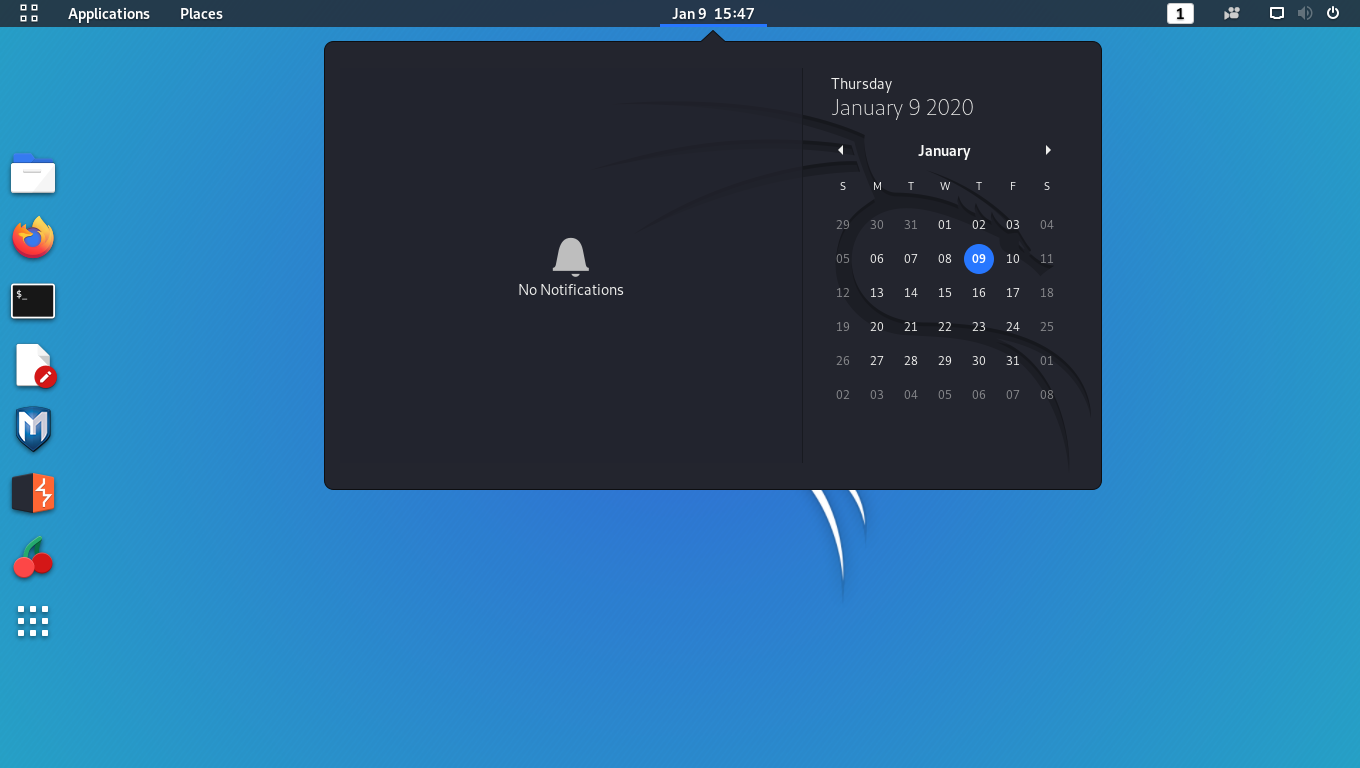
Today Kali 2020.1 has been released and with it lots of new visual changes for its desktop. The following is a brief feature summary for this release:
Non-Root by default
Kali single installer image
Kali NetHunter Rootless
Improvements to theme & kali-undercover
New tools
But here I'm not going to explain all the latest improvements that have been introduced in this version but to reveal all the different themes and visual modifications that come with it. By the way, an essential change that I do want to emphasize is the switch to a default non-root user, with the username "kali" and password "kali". For more of the reasons behind this switch, please see this blog post: kali.org/news/: Kali Default Non-Root User.
Today Kali Linux 2019.4 just launched, and I'm so excited to announce that, for the last two months, I've been working together with the Kali team developing all its new look. The first noticeable change is the move from Gnome to Xfce as the default desktop. This change was made to make default Kali more comfortable for low resource computers, as it is also commonly used on small ARM devices that don't have as high performance as an average desktop.
If you don't want to leave Gnome, don't worry. Kali now offers a Gnome build for you with some of the new desktop themes. As this release was focused on the Xfce DE change, most of the latest changes were intended for this desktop. For next releases, more changes will be available for all kali flavors to get them "close" to a similar user experience no matter the environment you run.
When I was about to create this new fancy blog for my website, I was wondering what would be the easiest way to implement it without losing much time programming. Moments later, I was doing the same thing I always do when something could be just straight forward. Using an existing framework? Would you say... ... 🤦♂️
Noup! I created my own ultra-minimal framework to handle it. But that is great because now I can blog in my blog about the blog! 🤯 If that makes any sense at all.
This article explains step-by-step how to set up and use the Swagger Client module for your JavaScript project. It also shows examples about how to properly use it and some useful tips and tricks that may help you in your development.
About Swagger-js
Exactly as they define it in their github repository: Swagger Client is a JavaScript module that allows you to fetch, resolve, and interact with Swagger/OpenAPI documents. Thanks to these tools the developer is able to define the API to be used in a clean manner, and ensure all the code uses the latest API version.